Bạn đang xem: Slam là gì

Giới thiệu
SLAM – Simultaneous Localization And Mapping – là vấn đề phổ biến với một số ứng dụng liên quan đến điều khiển tự động. Trong bài viết này, tôi trình bày nội dung tổng quát về SLAM, các thiết bị tạo ra một hệ thống SLAM và xu hướng phát triển hệ thống SLAM hiện nay.
Visual SLAM là 1 phần trong định hướng luận văn, tôi thực hiện khảo sát tìm hiểu về SLAM và viết bài này chia sẻ một ít tìm hiểu về đề tài này.
SLAM là gì?
Là hệ thống sử dụng thông tin ảnh thu được từ camera để tái tạo môi trường bên ngoài bằng cách đưa thông tin môi trường vào một map (2D hoặc 3D), từ đó thiết bị (robot, camera, xe) có thể định vị (localization) đang ở đâu, trạng thái, tư thế của nó trong map để tự động thiết lập đường đi (path planning) trong môi trường hiện tại.
Điều khiển tự động thiết bị robot chia làm 3 vấn đề chính:
Định vị (localization).Tái tạo môi trường (mapping).Hoạch định đường đi (path planning).
Ban đầu, hai vấn đề định vị và tái tạo môi trường được nghiên cứu độc lập, tuy nhiên, sau khi nhận thấy:
Định vị: cần xác định vị trí hiện tại của robot dựa vào bản đồ tái tạo.Tái tạo bản đồ: cần xác định vị trí của đối tượng trong bản đồ, để xây dựng bản đồ chính xác nhất, ít sai số.
Vì thế, trong giai đoạn 1985-1990, Raja Chatila và Jean-Paul Laumond (1985) và Randall Smith (1990) đã đề xuất gộp hai vấn đề với nhau để nghiên cứu. Một thời gian sau đó, SLAM ra đời đại diện cho localization và mapping.
Xem thêm: Giờ Hoàng Đạo Là Giờ Gì – Cách Chọn Giờ Hoàng Đạo
Một số thuật ngữ
vision-based SLAM, vSLAM, visual SLAM, vision-only SLAM, camera-only SLAM: khi những camera được sử dụng với mục đích như một cảm biến ngoại vi (exteroceptive sensor).visual-inertial SLAM: là hệ thống visual SLAM nhưng được bổ sung thêm thông tin thu được từ cảm biến nội vi (proprioceptive sensor) nhằm tăng độ chính xác của mô hình SLAM.
Cảm biến
Cảm biến ngoại vi (exteroceptive sensor)
Nhận và đo thông tin các thành phần ở môi trường xung quanh.
Sonar: thiết bị sử dụng sóng âm thanh thu được để dò tìm và xác định vị trí của đối tượng dưới nước, sonar còn được sử dụng cả trên đất liền.
Ứng dụng:
Dùng để thăm dò dầu mỏ trên đất liền: sonar phát tín hiệu xung xuống đất, âm thanh được phản xạ lại nhờ các tầng đá dưới đất, các nhà khoa học sử dụng sóng âm thanh thu được để xác định có dầu mỏ dưới đất hay không.Ứng dụng quân sự: được ứng dụng trong máy đo hồi âm của Hải quân Mỹ (1919) để kiểm tra có phải tàu của Mỹ hay không, dựa vào cơ sở dữ liệu âm thanh đầy đủ (tiếng nổ của từng kiểu vũ khí, tiếng rung khi tàu chạy).Thiết bị dò tìm cá: sonar phát ra tín hiệu xung vào khu vực dò tìm, đàn cá lớn sẽ làm xung phản xạ bị biến dạng, thay đổi.
Laser rangefinder: thiết bị sử dụng tia laser để xác định khoảng cách đến một đối tượng, phương pháp được sử dụng phổ biến là toán tử time-of-flight (gởi một chùm tia laser đến đối tượng và đo thời gian phản xạ lại từ đối tượng về nơi bắn tia laser).
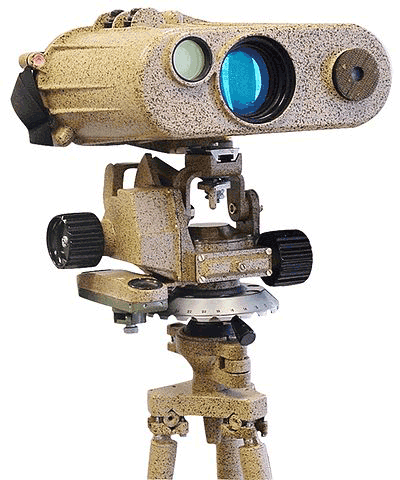
Laser rangefinder
Ứng dụng:
OLS-27 IRST: hệ thống phát hiện và theo vết đối tượng (trực thăng hay máy bay phản lực) từ thông tin gởi về từ bức xạ hồng ngoại.Máy quét LIDAR: được sử dụng để quét buildings hoặc cấu tạo của đá để tạo ra mô hình 3D.Máy đo: Bosch PLR 25.
Xem thêm: ground floor là gì
Camera: thu hình ảnh từ môi trường xung quanh.
Chuyên mục: Hỏi Đáp