Bộ điều khiển PID (Bộ điều khiển theo tỷ lệ-tích phân-đạo hàm) được sử dụng trong hầu hết các ứng dụng điều khiển quá trình tự động trong công nghiệp hiện nay để điều chỉnh lưu lượng, nhiệt độ, áp suất, mức độ và nhiều biến quy trình công nghiệp khác.
Bạn đang xem: Pid là gì
Chúng có từ năm 1939, khi Taylor Instrument và Foxboro giới thiệu hai bộ điều khiển PID đầu tiên. Tất cả các bộ điều khiển ngày nay đều dựa trên các chế độ tỷ lệ, tích phân và đạo hàm ban đầu.
Bộ điều khiển PID là đặc trưng của các hệ thống điều khiển quy trình hiện đại, vì chúng tự động hóa các nhiệm vụ quy định mà nếu không thì phải thực hiện thủ công. Mặc dù chế độ điều khiển tỷ lệ là động lực chính trong bộ điều khiển, mỗi chế độ đáp ứng một chức năng duy nhất. Các chế độ điều khiển theo tỷ lệ và tích phân là rất cần thiết cho hầu hết các vòng điều khiển, trong khi chế độ đạo hàm là tuyệt vời cho điều khiển chuyển động. Kiểm soát nhiệt độ là một ứng dụng điển hình sử dụng cả ba chế độ điều khiển.
Ví dụ điều khiển nhiệt độ bằng tay
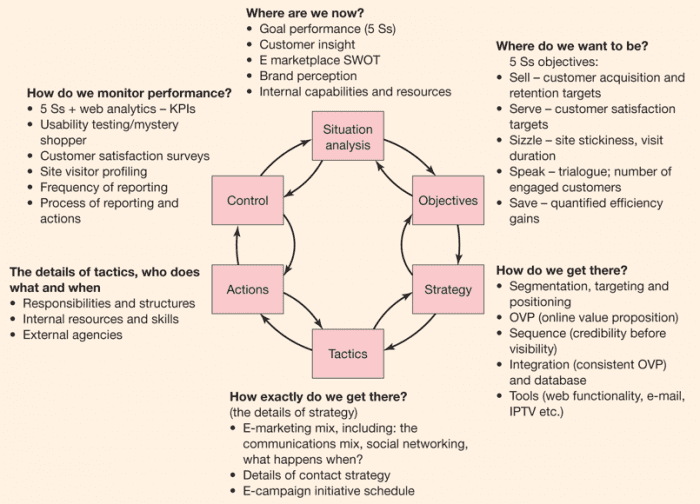
Không có bộ điều khiển PID, điều khiển thủ công nhiệt độ nước là một quá trình tẻ nhạt. Ví dụ, để giữ nhiệt độ không đổi của nước xả ra từ lò sưởi đốt gas công nghiệp, người vận hành phải xem đồng hồ đo nhiệt độ và điều chỉnh van gas nhiên liệu phù hợp (Hình 1). Nếu nhiệt độ nước trở nên quá cao, người vận hành phải đóng van gas vừa đủ để đưa nhiệt độ trở về giá trị mong muốn. Nếu nước quá lạnh, anh ta phải mở van gas.
Nhiệm vụ điều khiển được thực hiện bởi người vận hành được gọi là điều khiển phản hồi, bởi vì người vận hành thay đổi tốc độ đốt dựa trên phản hồi từ quá trình thông qua đồng hồ đo nhiệt độ. Người vận hành, van, lò sưởi (process) và đồng hồ đo nhiệt độ tạo thành một vòng điều khiển. Bất kỳ thay đổi nào của người vận hành đối với van gas đều ảnh hưởng đến nhiệt độ, được đưa trở lại cho người vận hành, nó là vòng lặp đóng.
Điều khiển nhiệt độ tự động
Để tự động hóa điều khiển nhiệt độ với bộ điều khiển PID, cần có những điều sau đây:
Lắp đặt thiết bị đo nhiệt độ điện tửTự động hóa van bằng cách thêm một bộ truyền động – Actuator (và có lẽ là một bộ định vị – Positioner) để nó có thể được điều khiển bằng điện tửCài đặt bộ điều khiển và kết nối nó với thiết bị đo nhiệt độ và van điều khiển tự động
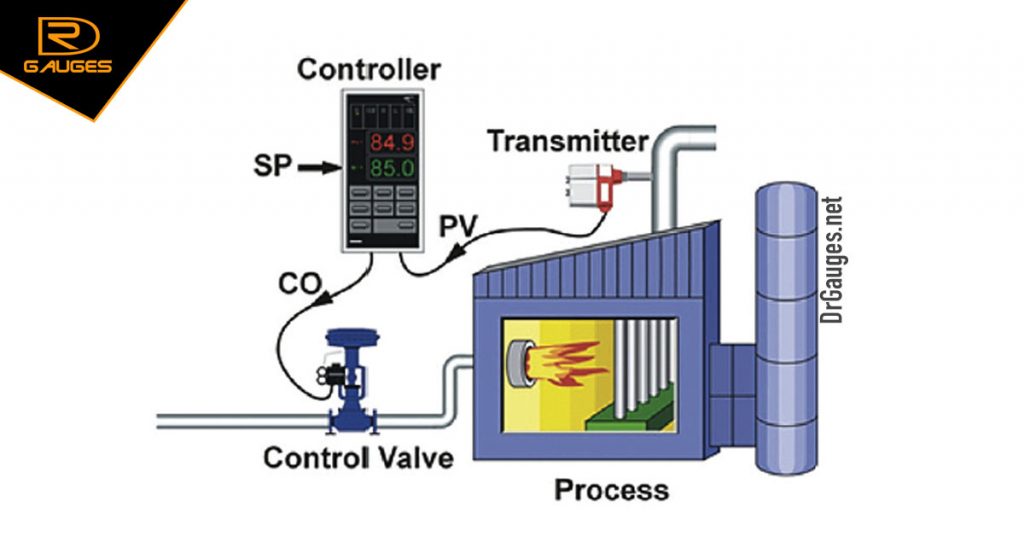
Người vận hành đặt điểm đặt bộ điều khiển PID (SP) ở nhiệt độ mong muốn và đầu ra của bộ điều khiển (Control Output – CO) đặt vị trí của van điều khiển. Nhiệt độ đo được từ cảm biến nhiệt độ, được gọi là biến quá trình (PV), sau đó được truyền đến bộ điều khiển PID, so sánh nó với điểm đặt (SP) và tính toán chênh lệch hoặc sai số (E) giữa hai tín hiệu. Dựa trên lỗi (sai số E) và các hằng số điều chỉnh của bộ điều khiển, bộ điều khiển tính toán đầu ra của bộ điều khiển thích hợp để đặt van điều khiển ở vị trí chính xác để giữ nhiệt độ tại điểm đặt (Hình 2). Nếu nhiệt độ tăng trên điểm đặt của nó, bộ điều khiển sẽ giảm vị trí van và ngược lại.
Mỗi bộ điều khiển có ba chế độ phản ứng khác nhau với lỗi. Lượng phản hồi được tạo bởi mỗi chế độ điều khiển được điều chỉnh bằng cách thay đổi các thông số của bộ điều khiển
Chế độ điều khiển tỷ lệ (Proportional Control Mode)
Chế độ điều khiển tỷ lệ thay đổi đầu ra của bộ điều khiển tỷ lệ với lỗi. Nếu lỗi tăng, ngõ ra điều khiển tăng tăng tỷ lệ thuận.
Thông số có thể cài đặt cho điều khiển tỷ lệ được gọi là Độ lợi của bộ điều khiển (Kc). Độ lợi bộ điều khiển cao hơn làm tăng ngõ ra điều khiển tỷ lệ cho một lỗi nhất định. Nếu mức tăng của bộ điều khiển được đặt quá cao, vòng điều khiển sẽ bắt đầu dao động và trở nên không ổn định. Nếu được đặt quá thấp, vòng điều khiển sẽ không đáp ứng đầy đủ với các nhiễu hoặc khi thay đổi giá trị đặt (set point).
Đối với hầu hết các bộ điều khiển, việc điều chỉnh cài đặt độ lợi của bộ điều khiển ảnh hưởng đến lượng phản hồi trong các chế độ điều khiển tích phân và đạo hàm
Bộ điều khiển chỉ điều khiển tỷ lệ
Một bộ điều khiển PID có thể được cấu hình để chỉ tạo ra một hành động tỷ lệ bằng cách tắt các chế độ tích phân và đạo hàm. Bộ điều khiển tỷ lệ đơn giản dễ hiểu và dễ điều chỉnh: đầu ra của bộ điều khiển chỉ đơn giản là lỗi điều khiển nhân với độ lợi của bộ điều khiển, cộng với sai lệch. Sự sai lệch là cần thiết để bộ điều khiển có thể duy trì đầu ra khác không trong khi sai số bằng 0 (biến quá trình tại điểm đặt). Hạn chế là phải bù đắp (offset), đó là một lỗi duy trì không thể được loại bỏ chỉ bằng điều khiển tỷ lệ. Trong điều khiển chỉ theo tỷ lệ, phần bù sẽ vẫn tồn tại cho đến khi người vận hành thay đổi độ lệch trên đầu ra của bộ điều khiển để loại bỏ phần bù. Điều này được gọi là thiết lập lại thủ công của bộ điều khiển.
Chế độ điều khiển tích phân (Integral Control Mode)
Nhu cầu thiết lập lại thủ công dẫn đến sự phát triển của thiết lập lại tự động, được gọi là chế độ điều khiển tích phân. Chức năng của chế độ điều khiển tích phân là tăng hoặc giảm đầu ra của Bộ điều khiển theo thời gian để giảm lỗi, miễn là có bất kỳ lỗi nào xảy ra (biến quá trình không ở điểm đặt). Cho đủ thời gian, hành động tích phân sẽ điều khiển đầu ra của bộ điều khiển cho đến khi sai số bằng không.
Xem thêm: Null Là Gì – Ký Tự Rỗng
Nếu lỗi lớn, chế độ tích phân sẽ tăng / giảm đầu ra của bộ điều khiển với tốc độ nhanh; nếu lỗi nhỏ, thay đổi sẽ chậm. Đối với một lỗi nhất định, tốc độ của hành động tích phân được đặt bởi cài đặt thời gian tích phân (Ti) của bộ điều khiển. Nếu thời gian tích phân được đặt quá lâu, bộ điều khiển sẽ chậm chạp; nếu nó được đặt quá ngắn, vòng điều khiển sẽ dao động và không ổn định.
Hầu hết các bộ điều khiển sử dụng thời gian tích phân tính bằng phút làm đơn vị đo cho điều khiển tích phân. Một số sử dụng thời gian tích phân tính bằng giây và một vài bộ điều khiển sử dụng mức tăng tích phân (Ki) lặp lại mỗi phút.
Bộ điều khiển tỷ lệ + tích phân
Thường được gọi là bộ điều khiển PI, đầu ra Bộ điều khiển tỷ lệ + tích phân được tạo thành từ tổng của các hành động điều khiển tỷ lệ và tích phân.
Sau khi xáo trộn, chế độ tích phân tiếp tục tăng đầu ra Bộ điều khiển cho đến khi nó loại bỏ tất cả phần bù và đưa nhiệt độ đầu ra của bộ gia nhiệt trở về điểm đặt.
Chế độ điều khiển đạo hàm
Điều khiển đạo hàm hiếm khi được sử dụng trong các điều khiển quá trình, mặc dù nó thường được sử dụng trong điều khiển chuyển động. Nó rất nhạy cảm với nhiễu đo lường, nó làm cho việc điều chỉnh thử và lỗi trở nên khó khăn hơn và nó không hoàn toàn cần thiết cho việc kiểm soát quy trình. Tuy nhiên, sử dụng chế độ đạo hàm của bộ điều khiển có thể tạo ra một số loại vòng điều khiển nhất định – ví dụ như điều khiển nhiệt độ – đáp ứng nhanh hơn so với chỉ điều khiển PI.
Chế độ điều khiển đạo hàm tạo ra một đầu ra dựa trên tốc độ thay đổi của lỗi. Nó tạo ra nhiều hành động kiểm soát hơn nếu lỗi thay đổi với tốc độ nhanh hơn; nếu không có thay đổi trong lỗi thì hành động đạo hàm bằng không. Chế độ này có cài đặt có thể điều chỉnh được gọi là Thời gian đạo hàm (Td). Cài đặt thời gian đạo hàm càng lớn, hành động đạo hàm càng được tạo ra. Tuy nhiên, nếu thời gian đạo hàm được đặt quá lâu, dao động sẽ xảy ra và vòng điều khiển sẽ không ổn định. Cài đặt Td bằng 0 sẽ tắt chế độ đạo hàm. Hai đơn vị đo được sử dụng cho cài đặt đạo hàm của bộ điều khiển: phút và giây.
Bộ điều khiển PID
Đầu ra của bộ điều khiển PID được tạo thành từ tổng của các hành động điều khiển tỷ lệ, tích phân và đạo hàm.
Trong bộ điều khiển PID, chế độ đạo hàm cung cấp nhiều hành động điều khiển sớm hơn có thể với điều khiển P hoặc PI. Điều này làm giảm ảnh hưởng của nhiễu loạn và rút ngắn thời gian để mức trở về điểm đã đặt.
Xem thêm: Tải Game Bigone – Bigone Game đổi Thưởng Cho Android
Hình dưới so sánh thời gian phục hồi nhiệt độ đầu ra của quá trình gia nhiệt sau khi thay đổi áp suất khí nhiên liệu đột ngột dưới điều khiển P, PI và PID.
Chuyên mục: Hỏi Đáp