Điều khiển PID: là một kiểu điều khiển có hồi tiếp, ngõ ra thay đổi tương ứng với sự thay đổi của giá trị đo.
Người ta có thể chỉ áp dụng điều khiển P, PI, hay PID.
Bạn đang xem: điều khiển pid là gì
Công thức toán của bộ điều khiển PID trên miền Laplace:

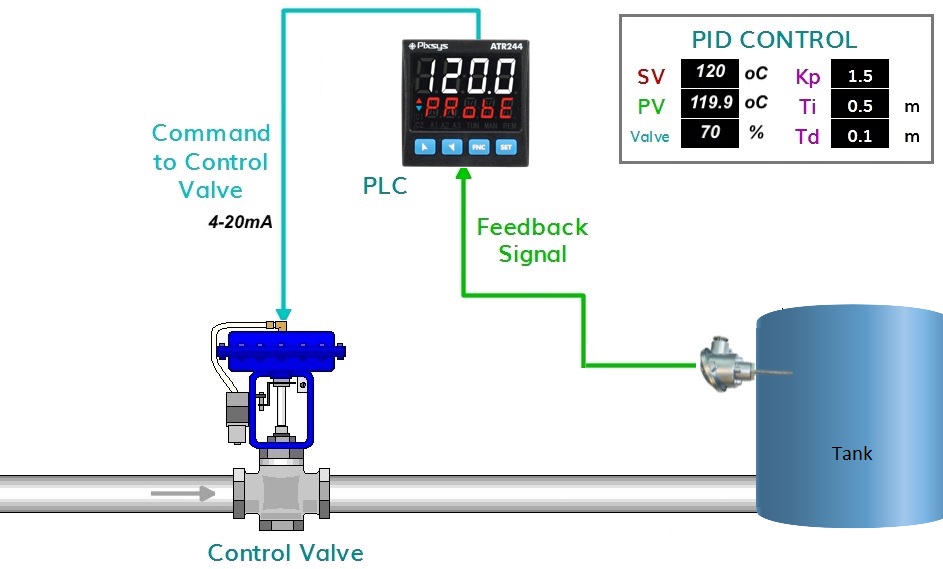
Điều chỉnh tỉ lệ (P): là phương pháp điều chỉnh tạo ra tín hiệu điều chỉnh tỉ lệ với sai lệch đầu vào.
Điều chỉnh tích phân (I): là phương pháp điều chỉnh tỉ lệ để lại một độ lệch (offset) sau điều chỉnh rất lớn. Để khắc phục ta sử dụng kết hợp điều chỉnh tỉ lệ với điều chỉnh tích phân. Điều chỉnh tích phân là phương pháp điều chỉnh tạo ra tín hiệu điều chỉnh sao cho độ lệch giảm tới 0. Thời gian càng nhỏ thể hiện tác động điều chỉnh tích phân càng mạnh, ứng với độ lệch càng bé.
Xem thêm: nghiên cứu khoa học tiếng anh là gì
Điều chỉnh vi phân (D): khi hằng số thời gian hoặc thời gian chết của hệ thống rất lớn điều chỉnh theo P hoặc PI có đáp ứng quá chậm thì ta sử dụng kết hợp với điều chỉnh vi phân. Điều chỉnh vi phân tạo ra tín hiệu điều chỉnh sao cho tỉ lệ với tốc độ thay đổi sai lệch đầu vào.
Xem thêm: Scenario Là Gì – Nghĩa Của Từ Scenario
Thời gian càng lớn thì điều chỉnh vi phân càng mạnh, ứng với bộ điều chỉnh đáp ứng với thay đổi đầu vào càng nhanh.
Chuyên mục: Hỏi Đáp